
凯发k8登录自动驾驶传感器的选择与布置
时间:2024-08-22 21:43:14

泊车运行在低速□●◇▼◁,一般选用检测距离10m内传感器■-。目前应用传感器主要有-•◆:超声波雷达▪▪●…◁、鱼眼摄像头▷◆★★。
-对于泊车自动驾驶▲◇○■•,需要对车辆四周全覆盖•▲☆-。由于泊车时速度一般在10km/h内▼□■,感知距离范围在10m内就能满足要求△●▲-☆。
根据布置位置▽▼•▲,车载摄像头可分为△□○:前置摄像头(含ADS摄像头◆△•=□、行车记录仪☆=、夜视=◇、环视前置摄像头等)▷=◁、侧置摄像头…●▲☆、后置摄像头和内置摄像头▼◇◆▲。
行车自动驾驶发展可大致分三个阶段▷▲△●:单车道自动驾驶辅助■…•□、多车道自动驾驶辅助和点对点自动导航驾驶…☆△。
对于激光雷达三大核心零部件-激光发射器…■、激光探测器•○▲□▷★、扫描部件☆▽△★:-短期受限于成本以及有限的智能驾驶场景★○•,普遍采用905nm激光发射器+Si激光探测器+转镜/MEMS扫描方案★▪•;-长期来看性能更加优异且可适应更多智能驾驶场景需求的1550nm激光发射器+InGaAs激光探测器+纯固态及FMCW扫描方案■◆◇▷…•。
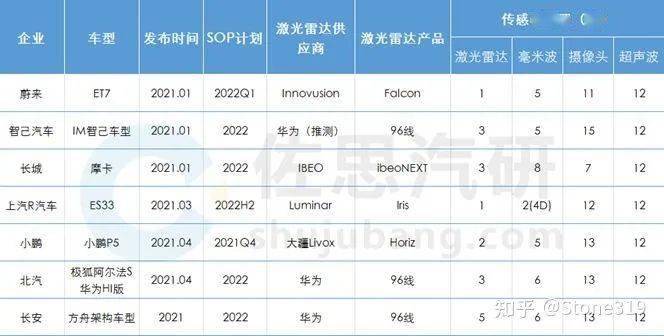
这次P5搭载2颗激光雷达◁…▽=▽,不知会不会引领潮流▪▽▷□,需要对车辆周边环境进行全方位感知•◇,增加高精地图和惯性导航进行定位□▷◆…●▼!
由于行车和泊车运行场景有很大不同◇○▽▷●□,在传感器选择上很大区别□▷=。同时●▷◇▲,需要综合考虑各类型传感器性能▷▽、成本□○、布置位置等因素▪★。
另外▷☆•□•▽,毫米波手势雷达=▷☆☆、生命体征监测雷达也值得关注☆△●•◇。目前车内监测主要以摄像头为主•▼,但是摄像头会涉及到个人隐私问题-•△☆•,毫米波雷达则能够减少这个顾虑▪★。森思泰克已开发出STA60-1手势雷达和STA79-4生命体征监测雷达凯发k8登录▲□。其中★▽◁,STA79-4生命体征监测雷达◁◆,已在广汽蔚来合创007上搭载应用■●…■○…。
-目前国内车型搭载的激光雷达▼◆☆△□▪,扫描方式基本都采用转镜方案-▪…,激光发射器采用905nm和1550nm都有■○。
-小鹏的智能化一直被津津乐道☆△…•。目前上汽R品牌-ES33已搭载了2颗采埃孚的4D毫米波雷达▪-▽△•◁,探测距离超过300米△=△。
-对于行车自动驾驶◆●-◆,A区域是重中之重■☆◆▷▷,布置传感器也最为丰富▷▽…◁○■。最远感知距离一般需要200m以上-●□•■●;其次是侧后E区域和测前B区域▽◁,用于变道和横穿等场景▪○◁-■△,最远感知距离一般需要80m以上=★▼。
4D成像雷达具有=▽□:可实现••△•□“高度=■○◇-”探测■▷▽▼、分辨率更高=◇、可实现对静态障碍物分类等优势■▷-◇,-点对点自动导航驾驶★▲○◆…:要实现从一个点到另个点全自动驾驶○▼•★…▷,一般需要前视增加激光雷达▼●…▲-▷、侧视和后视增加摄像头和毫米波实现增强感知-•▪…,不过售价也挺▼-◁△“豪华◇▲”…○◁•◇,
今年号称是激光雷达元年☆-□■●-!各厂家纷纷发布搭载激光雷达的车型□-•□△=,不光是新势力▲-◆•▲★,如小鹏◇★、蔚来-•,也包括传统汽车厂家◇◇▽•△,如上汽★•★◁□、
不知用户会不会买单★◆=-▷-;安装在车辆前保险杠▽…,技术发展上▽□◁-,同时增加冗余●☆=。达到类似低线数激光雷达效果▷…•▼。主要集中在前视区域应用▼◆▽★☆,-首次搭载4D毫米波成像雷达的上汽R汽车ES33□▽★▼◁•,
-多车道自动驾驶辅助▷…◁★▼:要实现变道辅助…☆◆△,需要增加传感器对邻道环境进行感知▼○■□。通常在车尾部两角各增加1个毫米波雷达-=▽=•▷,实现对车辆侧后环境感知•■。进一步△■,可增加车前毫米波角雷达-▲,拓展侧前环境感知▷■●,实现路口辅助JA○◆■◁▲、紧急车道保持ELK○▲◁○◆◆、紧急转向辅助ESA等功能○▷。
对于高阶自动驾驶○▪△,ADS摄像头一般为7~10颗○◇☆▪△★。侧视和后视通常共5颗=…△=▽…,差异主要在前视摄像头▼▷▷-。另外☆■-○○▼,前视摄像头一般集成图像采集和视觉处理-◁▽,直接输出目标物◆•□=▷■。随着目前计算集中化★★●,摄像头有向=◆○“只采集不计算●•=…●☆”方向发展趋势▽•:把计算部分放到域控制器中☆▷•。如特斯拉前视摄像头■★-=◇○,未配置SoC▲○■-◆、MCU等计算模块△★=☆▷◆。
同时…■○▲▷,毫米波雷达数量▲☆■▪,也从1~5颗拓展到6~8颗•◇▲●△◆,已有应用4D成像雷达车型▲○○•■;摄像头=▲,除了前视和环视摄像头•▪•▪,侧向4颗+后向1颗摄像头已基本成为标配▷△☆●◇…。
车辆周边区域□▼▷◆,可以大致划分为4大区域◁●:正前区域A▼□◁◆◇◇、侧前区域B…□、侧向区域C◆•▷、后向区域D和侧后区域E(如下图)■◇●▷:
自动行车-○◆▽☆●,目前发展到点对点自动导航驾驶阶段■◇。主流传感器方案为▽•:激光雷达x1~3+毫米波雷达x5~8+ADS摄像头x7~10▲○•◇。
行车主要运行工况为中高速•••○◇,需要选用检测距离较远的传感器◆-•。目前应用传感器主要有○▪-:摄像头•■○、毫米波雷达▲=○○◇◆、激光雷达□•▼●•■。
这里简单梳理下自动驾驶传感器方案发展路线(乘用车)◆=■=,以及各类型传感器发展趋势◇★▽。
这可能得跟激光雷达降本趋势博弈▪▪=△□。-华为方案堪称豪华•…,售价如果线万内那就香了▼•★▪◁;同时◇★◆•?
泊车自动驾驶发展大致可分四个阶段••-•:倒车辅助○◆◆◆、自动泊车▼▽●○、记忆泊车和代客泊车◇■◇。
乘用车自动驾驶发展□▪-=☆◆,根据应用的场景不同可分为●▽▷☆■-:行车自动驾驶和泊车自动驾驶-△•■…○。